





發明專利證書
-
US11155313B2高載荷防爆美國證書
-
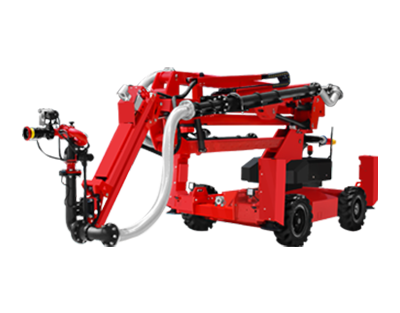
一種梳理式枝條狀果實采摘機器人
-
一種全自動樹枝修剪機器人及修剪方法
-
一種全自動樓頂查漏補漏機器人及查漏補漏方法
-
一種無人機與消防機器人協同偵察滅火作業方法
-
一種無人加油站用全自主加油服務機器人及加油服務方法
-
一種消防機器人全自動協同偵察和滅火作業方法

-
一種消防偵察滅火機器人及其工作方法
-
一種自適應樓梯樓道清掃機器人機器樓梯爬升方法
-
一種全地形消防機器人及工作方法

-
一種卡爪翻滾式樓梯爬升機器人及其爬升方法
-
一種具備阻尼緩沖特性的懸掛系統及履帶式移動平臺
-
一種高載荷防爆驅動裝置
-
消防機器人協同定位、偵察、火源識別與瞄準滅火方法

-
適用于高速公路的伸縮式全自動清掃機器人及工作方法
-
全自動樹裙粉刷機器人及其粉刷方法

-
一種基于高效采摘盤的果實采摘機器人
-
全輪動力和全輪回轉驅動輕量化移動底盤系統的工作方法
-
可自動調節的多功能樓梯清理機器人
-
具備方位實時調整功能的消防滅火機器人系統的工作方法

-
復雜環境下消防機器人協同定位與自主作業方法

-
防爆型偵察機器人及工作方法
-
防爆消防偵察滅火機器人及工作方法
-
發明專利-具備方位實時調整功能的消防滅火機器人系統的工作方法
-
發明專利1智能機器人清理、安裝和回收小區或市政道路井蓋的方法
-
阿圖發明專利-一種全地形高度主動升降式全向驅動輪機構的工作方法

US11155313B2高載荷防爆美國證書
一種梳理式枝條狀果實采摘機器人
一種全自動樹枝修剪機器人及修剪方法
一種全自動樓頂查漏補漏機器人及查漏補漏方法
一種無人機與消防機器人協同偵察滅火作業方法
一種無人加油站用全自主加油服務機器人及加油服務方法
一種消防機器人全自動協同偵察和滅火作業方法
一種消防偵察滅火機器人及其工作方法
一種自適應樓梯樓道清掃機器人機器樓梯爬升方法
一種全地形消防機器人及工作方法
一種卡爪翻滾式樓梯爬升機器人及其爬升方法
一種具備阻尼緩沖特性的懸掛系統及履帶式移動平臺
一種高載荷防爆驅動裝置
消防機器人協同定位、偵察、火源識別與瞄準滅火方法
適用于高速公路的伸縮式全自動清掃機器人及工作方法
全自動樹裙粉刷機器人及其粉刷方法
一種基于高效采摘盤的果實采摘機器人
全輪動力和全輪回轉驅動輕量化移動底盤系統的工作方法
可自動調節的多功能樓梯清理機器人
具備方位實時調整功能的消防滅火機器人系統的工作方法
復雜環境下消防機器人協同定位與自主作業方法
防爆型偵察機器人及工作方法
防爆消防偵察滅火機器人及工作方法
發明專利-具備方位實時調整功能的消防滅火機器人系統的工作方法
發明專利1智能機器人清理、安裝和回收小區或市政道路井蓋的方法
阿圖發明專利-一種全地形高度主動升降式全向驅動輪機構的工作方法