興智能科技股份有限公司")



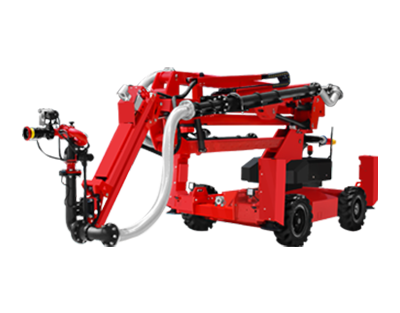

消防機(jī)器人屬于特種機(jī)器人范疇,具備爬坡、登梯及障礙物跨越,耐溫和抗熱輻射,防雨淋、防爆、隔爆,防化學(xué)腐蝕、防電磁干擾,遙控等行走和自衛(wèi)功能。機(jī)器換人保障安全 ,消防部隊(duì)在災(zāi)害現(xiàn)場(chǎng)展開(kāi)搶險(xiǎn)救援時(shí),如果采用人工消防必然存在以下問(wèn)題:
◆溝通障礙:偵察小組之間常用對(duì)講機(jī)作為聯(lián)絡(luò)手段,無(wú)法直觀的將現(xiàn)場(chǎng)情況反饋給后方指揮員;
◆環(huán)境有害:室內(nèi)外的災(zāi)害現(xiàn)場(chǎng)通常伴隨高溫、有毒、缺氧、濃煙、放射性等惡劣環(huán)境,消防員常常會(huì)遭受中毒、窒息等生命危險(xiǎn);
◆意外多發(fā):消防員在大型易坍塌建筑物、大型倉(cāng)庫(kù)堆垛等災(zāi)害現(xiàn)場(chǎng)進(jìn)行偵察搶救,常常有可能被墜落下來(lái)的坍塌物砸中,發(fā)生意外傷亡事故;
◆搶救低效:受災(zāi)害現(xiàn)場(chǎng)有害環(huán)境和個(gè)人防護(hù)裝備的限制,消防員在災(zāi)害現(xiàn)場(chǎng)通常滯留時(shí)間小于30分鐘。

鑒于以上人工消防工作的危害,消防機(jī)器人的設(shè)計(jì)可以代替消防員在惡劣環(huán)境中進(jìn)行火場(chǎng)偵察、化學(xué)危險(xiǎn)品探測(cè)、滅火、冷卻、洗消、破拆、救人、啟閉閥門(mén)、搬移物品、堵漏等作業(yè),實(shí)現(xiàn)“機(jī)器換人”,大大提高消防部門(mén)撲滅惡性火災(zāi)的能力,對(duì)減少?lài)?guó)家財(cái)產(chǎn)損失和滅火救援人員的傷亡具有重要的作用。隨著消防機(jī)器人的快速發(fā)展,種類(lèi)越來(lái)越多,功能越來(lái)越豐富,在搶險(xiǎn)救災(zāi)中發(fā)揮越來(lái)越重要的作用,但是在遠(yuǎn)程控制方面始終存在很大的缺陷。
目前消防機(jī)器人的控制方式只要是以WIFI或者單向微波+數(shù)傳電臺(tái)的方式來(lái)解決。WIFI由于它是高頻的原因在復(fù)雜環(huán)境下傳輸距離短,滿(mǎn)足不了應(yīng)用需求;單向微波+數(shù)傳電臺(tái)的方式只能進(jìn)行點(diǎn)對(duì)點(diǎn)的方式進(jìn)行傳輸,在對(duì)于地下、復(fù)雜環(huán)境或者多前端時(shí)無(wú)法滿(mǎn)足需求。
在當(dāng)前的環(huán)境下,我司致力于消防機(jī)器人遠(yuǎn)程智能通信控制系統(tǒng)研發(fā),以MESH技術(shù)為遠(yuǎn)程傳輸途徑,結(jié)合視頻、音頻、數(shù)據(jù)控制等一系列技術(shù),研發(fā)出視音頻、數(shù)據(jù)、控制于一體的智能通信控制系統(tǒng),能在同一區(qū)域內(nèi)操控多臺(tái)多種類(lèi)型的消防機(jī)器人,形成統(tǒng)一指揮,把事故現(xiàn)場(chǎng)的視頻、環(huán)境監(jiān)測(cè)數(shù)據(jù)等傳輸?shù)街笓]終端,為指揮部提供決策依據(jù)。