



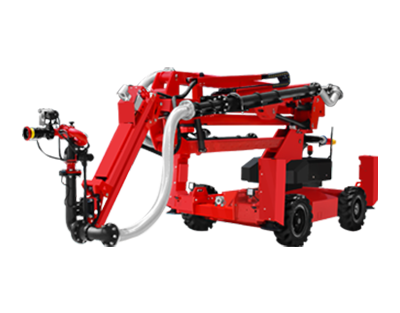

形狀可變履帶式機器人
所謂形狀可變履帶式機器人,是指該機器人所用履帶的構形可以根據地形條件和作業要求進行適當變化。有一種形狀可變履帶式機器人的外形示意圖。該機器人的主體部分是兩條形狀可變的履帶,分別由兩個主電動機驅動。當兩條履帶的速度相同時,機器人實現前進或后退移動;當兩條履帶的速度不同時,機器人實現轉向運動。當主臂桿繞履帶架上的軸旋轉時,帶動行星輪轉動,從而實現履帶的不同構形,以適應不同的運動和作業環境。

履帶式機器人可以根據機器人自身的自由度完成攀爬階梯和跨越溝渠等動作,多用于施工工地。不過為了延長機器人的使用壽命,以及減少在使用中發生故障,工作人員平時要定期對機器人進行養護,這樣才不會影響機器人的正常使用。

這種位置的改變既可以是一個自由度的,也可以是兩個自由度的。有一種二自由度變位履帶機器人,各履帶能夠繞車體的水平軸線和垂直軸線偏轉,從而改變履帶式機器人的整體構形。
相關標簽
下一篇
新聞分享