




美國開發鴕鳥機器人
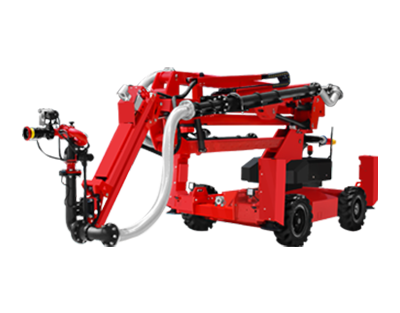
傳統有腳機器人靠的是陀螺儀等傳感器和計算機協助保持平衡,不過美國佛羅里達州彭薩科拉的人類和機器認知研究所(IHMC)研究人員開發一款小型的雙腿鴕鳥機器人,在不使用任何傳感器和計算機輔助的情況下進行穩定移動。

這款機器人看上去就像一只小型的鴕鳥。根據設計師 IHMC 的高級研究科學家杰里·普拉特(Jerry Pratt)介紹,這款鴕鳥機器人使用了橢圓輪設計,這種設計的好處在于當其中一條腿部感受到阻力時,另外一條腿將增加更多的力量來對抗阻力。平面橢圓輪由單個馬達驅動,在電能消耗方面也極大降低。鴕鳥機器人每小時可運行 16公里,如果將機器人制成一個成年人那么大,它的速度將能達到每小時48公里。

相關標簽
新聞分享