




全國首個履帶式采摘機器人落戶智慧農場
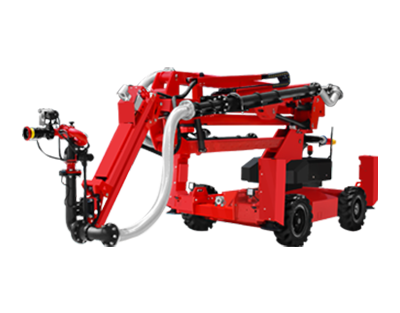
履帶式底盤車用于采摘果實
用機器人和遠程控制,代替傳統的田間勞作,提高農業生產的標準化,提升效率,是未來現代農業的發展發向。目前,研發人員正在開發一款采摘機器人,它不但可以實現機械式收割,還能做到智能判斷哪些果實已經成熟,哪些還不能摘,智慧程度可以媲美專業果農。

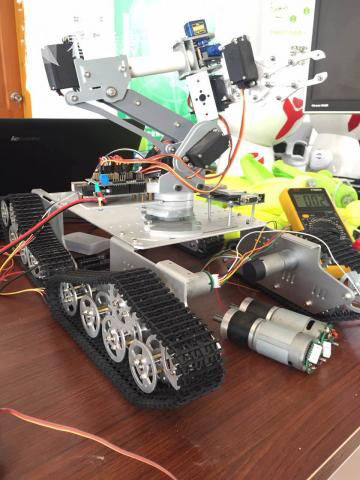
這臺有點像輛縮微版小坦克的是標點機器人,這個機器人平均每分鐘可以挖20個種果樹的標準坑,是人力速度的五到六倍。
還不算厲害,在機器人智慧農場,眼前這臺正在研發中的機器人,有六條鐵腿,形似蜘蛛。加上不同的程序模塊,就可以讓它在田間做開墾、除草、筑隴等任何重體力勞動。目前,靠這臺機器去采摘果實,理論上已經可以實現,研發人員要做的是,如何讓機器人辨認果實是否已經成熟的技術難題。
要想讓果實在完全成熟期,我們機械臂就能自動摘取,需要通過大量的算法還有一些遺傳算法,實現能讓機器人自動去判別這果子是否成熟。因此在技術上,還要加入色譜分析儀或者更多的傳感器,去輔助機械手臂識別哪些果實熟了,糖度夠了,哪些不能采,還得留在樹上。
只有通過技術上的疊加,形成一個精度非常準的智慧農業,才在機械化普及的同時,展開智能化的操作,讓農業更加簡單。
履帶式底盤車用于采摘果實落戶智慧農場。
相關標簽
下一篇
新聞分享