



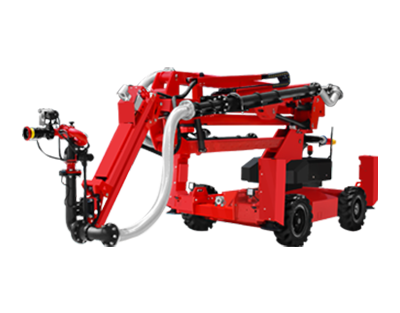

履帶式機器人在消防工作中的工作方式
履帶式機器人是根據鏈軌聲卡機架與路面觸碰而健身運動的,鏈軌聲卡機架發展趨勢室內空間大,行駛更為穩定。本通用性鏈軌機器人底盤,全車采用懸架計劃方案,更強的做到了長時間負荷減震。內窗高轉距交流電有刷電機減速機,汽車底盤驅動力弱,不畏艱難。準汽車底盤高寬比調整相互配合驅動力電機,使此車型具備低汽車底盤、根據性強、耐沖擊工作能力強等優勢,普遍使用于錯亂自然環境中智能機器人挪動解決計劃方案。
履帶式機器人路軌主機箱與路面觸碰,主動輪不觸碰路面。電動機推動主動輪旋轉時,在減速機的驅動器扭矩功效下,主動輪由主動輪上的傳動齒輪和鏈軌鏈的齒合傳動齒輪持續地從后盤繞鏈軌。因為在這兒,鏈軌沖著前行的反沖力,鏈軌的接地裝置一部分對路面釋放向后的力,它是促進設備前行的驅動力。假如推動力充足大,可以擺脫行車摩擦阻力,那麼滾軸便會往前翻轉,使設備砥礪前行。可對全鏈軌組織的前后左右鏈軌各自開展控制,進而減少道路轉彎半徑。
履帶式機器人路軌主機箱與路面觸碰,主動輪不觸碰路面。電動機推動主動輪旋轉時,在減速機的驅動器扭矩功效下,主動輪由主動輪上的傳動齒輪和鏈軌鏈的齒合傳動齒輪持續地從后盤繞鏈軌。因為在這兒,鏈軌沖著前行的反沖力,鏈軌的接地裝置一部分對路面釋放向后的力,它是促進設備前行的驅動力。假如推動力充足大,可以擺脫行車摩擦阻力,那麼滾軸便會往前翻轉,使設備砥礪前行。可對全鏈軌組織的前后左右鏈軌各自開展控制,進而減少道路轉彎半徑。

履帶式機器人的履帶底盤普遍使用于機械設備和戶外工作車倆。徒步組織因為徒步標準差,要有充足的抗壓強度、彎曲剛度和優良的行車、轉為工作能力。
因為我國現階段仍以履帶消防車救火為主,且總數較少,因此我國消防履帶式機器人的消耗量較小。因為地貌、健身運動等緣故,它一方面不可以適應較高的火情,另一方面因為總數比較有限,也不可以適應。一樣,火災事故也沒法解決,例如石油化工品。總而言之,說到底,它是一種技術性缺點,造成具體運用使用價值沒法充分發揮。
因為我國現階段仍以履帶消防車救火為主,且總數較少,因此我國消防履帶式機器人的消耗量較小。因為地貌、健身運動等緣故,它一方面不可以適應較高的火情,另一方面因為總數比較有限,也不可以適應。一樣,火災事故也沒法解決,例如石油化工品。總而言之,說到底,它是一種技術性缺點,造成具體運用使用價值沒法充分發揮。
相關標簽
上一篇
下一篇
新聞分享