




微型機器人新進展:利用柔性肌肉實現(xiàn)受控飛行
據(jù)外媒報道,多年來,哈佛大學(xué)的RoboBee項目一直處于微型機器人技術(shù)的前沿,他們研發(fā)的微型機器能夠飛行、游泳、懸停、棲息并擺脫束縛。現(xiàn)在,在一項新的發(fā)展中,RoboBee又成為了首個使用軟致動器,讓機器運動的人造肌肉,實現(xiàn)受控飛行的微型機器人。
軟致動器的主要好處是提高了回彈性--得益于小機器人的低質(zhì)量其已經(jīng)具備了這種能力。而擁有柔軟的人造肌肉意味著這款微型機器人在撞到墻、掉在地板或撞到其他機器蜂時避免受傷。
軟致動器的主要好處是提高了回彈性--得益于小機器人的低質(zhì)量其已經(jīng)具備了這種能力。而擁有柔軟的人造肌肉意味著這款微型機器人在撞到墻、掉在地板或撞到其他機器蜂時避免受傷。
雖然明白這種制動器所帶來的好處,但其制造難點是如何打造出足夠強大的軟致動器來實現(xiàn)飛行并且與此同時給予微型機器人足夠的控制來實現(xiàn)懸停。這個軟致動器技術(shù)被認為是第一個取得這些突破的。
最新的進展是研究人員在現(xiàn)有的電動軟致動器技術(shù)的基礎(chǔ)上使用了100毫克彈性體,當(dāng)暴露在電場中時,這些彈性體就會發(fā)生變形。
據(jù)了解,研究人員正是通過提高電場作用下電極的導(dǎo)電性才能讓微型機器人利用上剛性致動器的性能并實現(xiàn)每公斤600瓦的功率密度。
另外,研究人員還獲得了更好的穩(wěn)定性以此來建造出一個輕型機身來容納下微型機器人,其用了一根線來防止致動器彎曲--而這是軟人造肌肉歷來都不愿去嘗試的。
研究人員展示了這項技術(shù)。其中,雙翼版可以從地面起飛,而四翼版則在障礙重重的環(huán)境下遇到數(shù)次碰撞后仍可以繼續(xù)飛行。
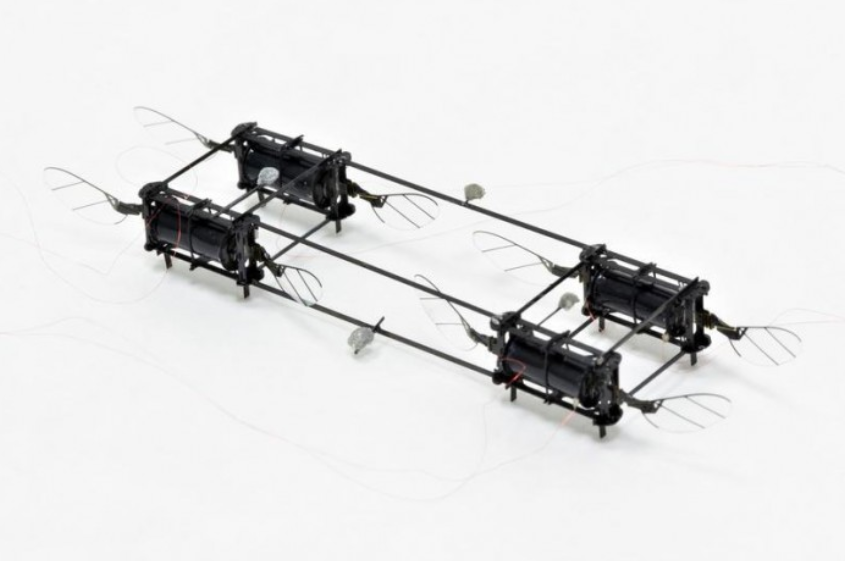
此外,他們甚至還讓兩個四翼模型碰撞以此來證明它們即便在相撞后仍能繼續(xù)飛行。他們還用四個致動器建立了一個八翼的。
研究人員希望這項技術(shù)未來能在搜索和救援工作中得到應(yīng)用,有可能讓機器人飛進瓦礫和密閉空間。他們表示,軟執(zhí)行器易于組裝和更換,但他們下一個面臨的挑戰(zhàn)是如何提高它們的效率。
相關(guān)標(biāo)簽
上一篇
下一篇
新聞分享