




影響消防機器人運動姿態因素
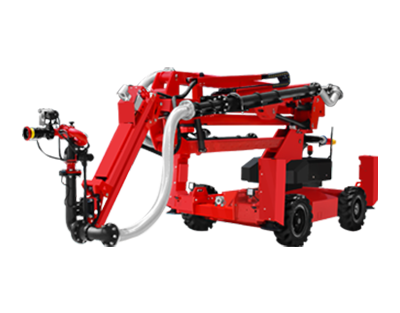
消防機器人的主體結構中,外框用鋁合金型材和板材搭建而成,并在其關鍵的受力區域進行焊接,框架內放置著蓄水裝置和調節消防機器人重心的調重塊以及控制中心,頂部安裝有6個風扇和絞車分別作為消防機器人的推進系統和提升系統,底部安裝著滅火槍和底輪。
消防機器人的運動姿態除了受直升機旋翼,火災現場的氣流的影響外,還會受到外界各種不可預測的干擾。安裝在消防機器人上的陀螺儀實時檢測其旋轉速度,經過處理換算可得到消防機器人旋轉的角加速度,電子羅盤可實時測出消防機器人正面與建筑物之間的夾角。

消防機器人左右兩個側面貼有壓力傳感器用來測量外界大風作用在消防機器人側面的壓力,三種傳感器獲得的信號傳輸到控制中心,經過控制算法解算出4個小風扇對應電機的轉速和運作時間,以實現將消防機器人正面與建筑物對齊和消防機器人左右位置的平衡。
消防機器人在空中受到外界干擾后引起的姿態偏移分為三類,X軸和Y軸的偏移以及繞Z軸的偏轉。當消防機器人在X軸或Y軸方向受到大風作用發生偏擺,由傳感器測出消防機器人側面的受力大小,控制中心分析出將消防機器人調節到平衡位置所需的作用力并換算成對應風機的轉速,調整其空中姿態。
相關標簽
上一篇
下一篇
新聞分享