



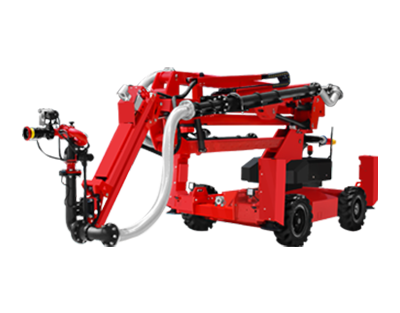

履帶式移動機器人底盤構架分析
履帶式底盤通過將環狀的循環履帶環繞在驅動輪和一系列滾輪外側,使車輪不直接于地面接觸,而是通過循環履帶于地面發生作用,再通過驅動輪帶動履帶,實現車輪在履帶上的相對滾動的同時,履帶在地面反復向前鋪設,從而帶動底盤運動。履帶式底盤的優點是著地面積比車輪式大,所以著地壓強小;另外與路面粘著力較強,所能提供的驅動力大。

根據履帶底盤結構的不同,履帶式移動機器人底盤主要有形狀可變履帶底盤和位置可變履帶底盤兩種結構形式。
底盤的主體部分是兩條形狀可變的履帶,分別由兩個主電動機驅動。當兩條履帶的速度相同時,底盤能夠向前或向后移動;當兩條履帶的速度不同時,機器人實現轉向運動。當主臂桿繞履帶架上的軸旋轉時,帶動行星輪轉動,從而實現履帶的不同構形,以適應不同的運動和作業環境。
相關標簽
新聞分享