




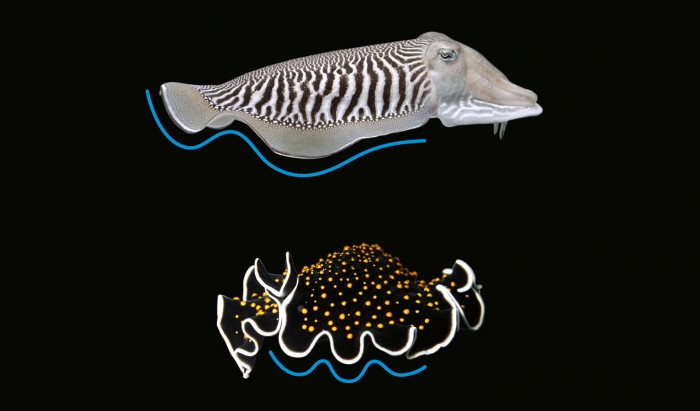
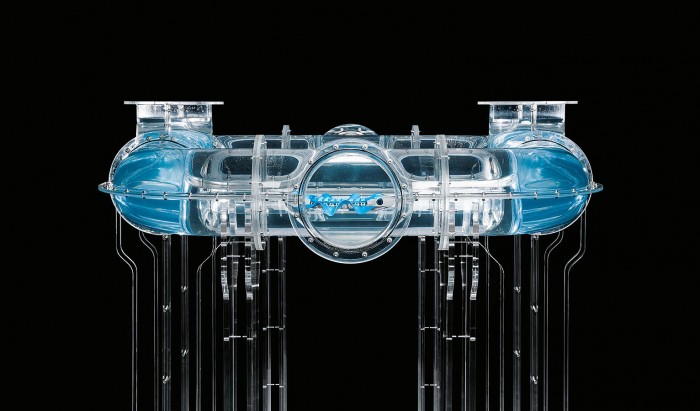
海渦蟲、烏賊和裸臀魚有一個共同點:要進行移動,它們利用自己的縱鰭生成連續波浪,并沿自己的體長推動身體前行。通過這種所謂的鰭片起伏運動,BionicFinWave也可以控制自身運動,穿過以丙烯酸玻璃制成的管道系統。自主水下機器人可以通過無線電與外界彼此通信,并將數據(如溫度和壓力傳感器測量值)傳輸到平板電腦。

自然樣板的縱鰭從頭部延伸到尾部,或位于背部、腹部,或身體兩側。隨著鰭片的起伏運動,魚將水推向身后,由此產生向前的推力。相反,這些生物也可以向后游動,并根據波形提供浮力、下沉力或側向推力。
靈活的硅膠鰭片確保逼真的游動
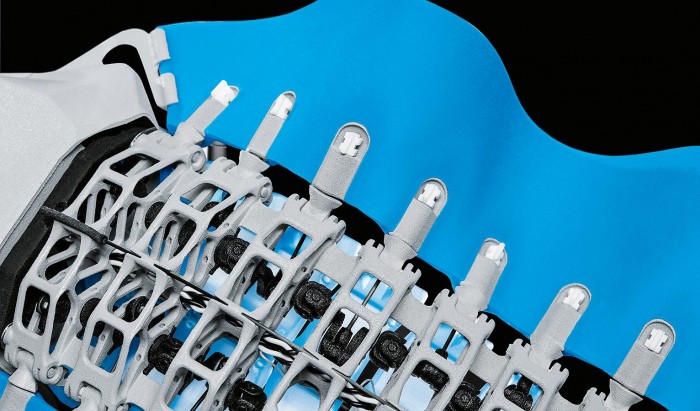
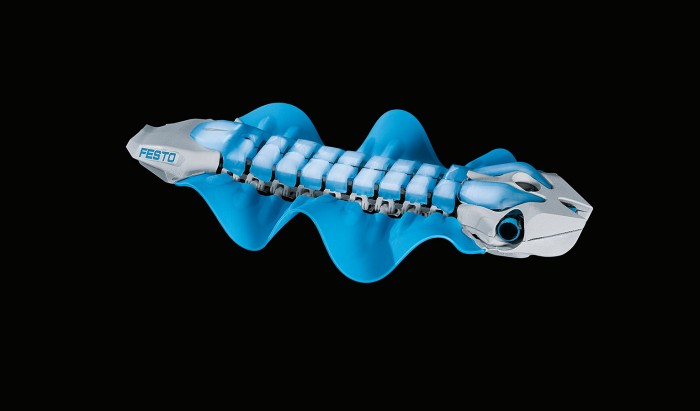

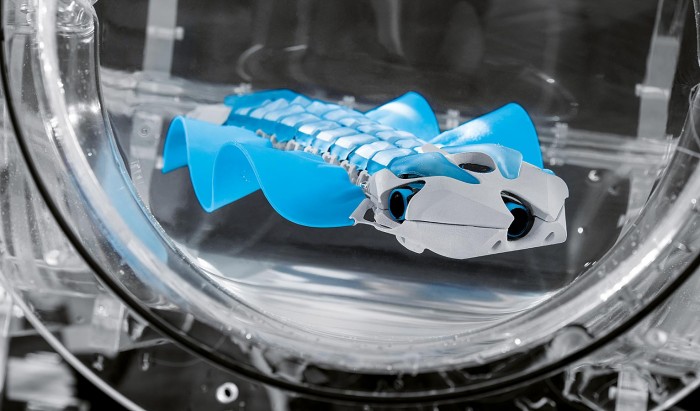
BionicFinWave使用其兩個側鰭移動。這些完全由硅膠制成,沒有支柱或其他支撐元件。因此,其柔韌度極強,可以真實地再現生物樣板的流暢波浪運動。
為此,兩個鰭片分別在左右兩側固定在九個小型杠桿臂上。這些由位于水下機器人機體上的兩個伺服電機驅動。兩個相鄰的曲軸將動力傳遞至杠桿,使兩個鰭片能夠單獨移動。以這種方式,它們可以產生不同的波形,特別適合于慢速和精確運動,并且相比例如傳統的螺旋傳動器,所攪拌的水量更少。
比如,要進行游動轉彎,外部鰭片的移動速度要快于內部鰭片,與挖掘機的鏈條同理。BionicFinWave頭部的第三個伺服電機控制機體的彎曲,使其能夠上下浮動。為了使曲軸具有相應的柔性和靈活性,每個桿段之間都設有萬向接頭。為此,包括接頭和曲柄連桿在內的曲軸以塑料打造而成,采用一體成型3D打印工藝。
各種組件的智能交互
BionicFinWave的其余主體元素同樣以3D打印制作。其空腔可用作浮子。同時,整個控制和調節技術具有防水功能,并且可在極小的空間內獲得可靠地安裝和協調。因此,在機身前部與帶有處理器和無線電模塊的電路板的相鄰位置還裝配有一個壓力傳感器和超聲波傳感器。這些持續測量到墻壁的距離以及水中的深度位置,從而避免與管道系統發生碰撞。
流程工業的新動力和新思路
借助仿生技術載體,我們的仿生學習網絡再次為與自動機器人的未來協作以及在液體介質應用中的全新驅動技術提供動力。我們可以設想,針對檢測、系列測量或數據采集等任務持續BionicFinWave等概念,例如用于水和廢水技術或流程工業的其他領域。此外,在項目中獲得的認識可用于柔性機器人部件的生產工藝。