





開門、踢足球、后空翻、雜技表演,這年頭還有什么是機器人做不到的!
迪士尼的特技替身反正是快要失業了,下一個擔心丟飯碗的可能就是蜘蛛俠了。
高校已經相繼研發出了爬墻機器人,飛檐走壁無所不能。
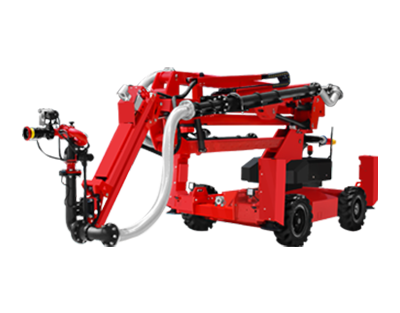
來自UC Berkeley的明星爬墻機器人,RSTAR
2018年Brisbane舉行的IEEE機器人與自動化國際會議(ICRA)上,這款名為 “后起之秀”(Rising STAR, or RSTAR)的機器人驚艷全場。它采用了伸直的輪腿靈活性,并增加了另一種自由度,使機器人的身體能夠與腿分開移動,通過改變質心幫助它爬過障礙物。
RSTAR是最新的一款,設計用于處理各種地形障礙,同時最小化運輸成本。在這個上下文中,“蔓生”指的是機器人的腿,它的角度(可調整地)向下和向身體外延伸。RSTAR有一個附加的自由度,它的身體可以改變相對于腿的位置,改變機器人的質心。
這似乎是一個簡單的改變,但它能讓一系列新的行為也可以發生了——不僅能讓機器人爬過更大的障礙物而不翻身,而且還能垂直爬上間隔很近的墻壁,還能通過調整腿的步態“爬行”穿過狹窄的縫隙。
RSTAR在堅硬的平面上最高速度約為1m/s,盡管它的烏龜步態意味著它可以處理非常柔軟或顆粒狀的表面(如厚泥或沙子)而不會被粘住。
在其前身STAR的基礎上,RSTAR增加了一個帶有一個馬達的簡單機械裝置,以來增強這款機器人克服障礙的能力。Zarrouk教授很快就融合了將輪子之間的距離延伸到車身的概念,并最終選擇了四桿擴展機構(FBEM)將質心向縱向移動,使機器人更具有可動態重構性。他最終發現,這個有趣的特性也可以用來增加穩定性,或者在需要的時候故意向上傾斜或上下翻轉。

RSTAR的蔓生旋轉機構的特點是蝸輪具有高齒輪比和自鎖時不被激活。電機的錐形齒輪確保兩個蝸桿齒輪以相同的速度旋轉,但方向相反。
最初的STAR非常擅長在障礙物下爬行,在崎嶇的地形上爬行,并且以非常高的速度爬行。但是,和其他所有的機器人一樣,它的攀爬能力受到輪子大小的限制。
它可以攀爬超過其車輪直徑70%的障礙物。通過改變它的高度和寬度,RSTAR在跑步上或者在粗糙的地形如砂礫、石頭或草中行走效率更高。
RSTAR也可以使用烏龜的步態在顆粒狀或高度滑的地形上爬行,而不必轉動車輪。RSTAR能爬升的障礙物的高度也更大了,并且大部分取決于其FBEM的桿長。
通過將它的質心移動到前方,RSTAR可以在不翻轉的情況下越過陡峭的斜坡。RSTAR還可以垂直爬升到類似管道的環境中,甚至可以在不接觸地面的情況下,通過將輪子按在墻上而水平爬行。
STAR系列非常適合執行搜索和救援行動,特別是在倒塌的建筑物或洪水地區等非結構化環境中。在一次真正的搜救行動中,機器人必須克服不同類型的連續障礙物才能到達目標。
這樣的機器人應該是簡單的,可靠的,并且能夠克服多種常見的障礙,而不需要任何外部的機械干預。RSTAR結合了幾種攀爬能力和形狀的變化,使它可以越過障礙物,或者在縫隙間或縫隙下偷偷溜進。此外,RSTAR速度較快,能耗較低,增加了工作范圍和工作時間。

裝有輪子的RSTAR能以20cm/s的速度爬上兩堵墻之間的空間,機器人的寬度可以根據墻壁的兩側而變化
來自迪士尼的VertiGo

VertiGo是一款能夠從地面到墻壁過渡的爬墻機器人,由迪士尼蘇黎世研究院和ETH合作開發。該機器人有兩個可傾斜的提供推力的螺旋槳和四個輪子。
一對輪子是可操縱的,每個螺旋槳有兩個自由度來調節推力的方向。通過從地面到墻壁再回到地面,VertiGo擴展了機器人穿越城市和室內環境的能力。機器人能夠快速地在墻上移動,并具有敏捷性。
使用螺旋槳在墻壁上提供推力可以確保機器人能夠穿過像磚石結構這樣的凹痕。選擇兩個螺旋槳而不是一個,可以實現從地板到墻壁的過渡——使用后螺旋槳將推力應用到墻壁上,使用前螺旋槳施加向上的推力,從而實現翻轉到墻壁上的目的。
來自Stanford的Stickybot系列及改進版SCAMP

從壁虎身上得到了靈感,壁虎的腳底覆蓋著數十億的纖維,具有200納米寬的腳套。壁虎可以附著在任何表面上,因為分子間有一種叫做范德華力的弱引力,作用于纖維尖端和壁虎爬行的表面之間。粘附是有方向性的:只有當腳趾向下拖動時,纖維才會粘附,而且會朝相反的方向釋放。
為了模擬壁虎的干式粘合,研究人員發明了一種聚合物貼片,上面覆蓋著大約30微米寬的柄。柄呈斜角,頂端傾斜,具有方向性粘性。膜片安裝在一個機器人的腳趾墊上,Cutkosky和Kim賦予該機器人一個壁虎的步態、卷曲的腳趾和其他細節。
斯坦福大學的研究人員已經獲得了一種生物感應裝置的專利,這種裝置可以利用各向異性摩擦材料來測量光滑的垂直表面。該設備的靈感來自壁虎和其他攀緣蜥蜴,采用類似的順應性和力控制策略來攀爬(或掛在)光滑的垂直表面,包括玻璃、瓷磚和塑料面板。
Stickybot的攀爬能力是毋庸置疑的,但是它不能飛行,因此,該實驗室繼續研究了一款新型的集攀爬和飛行于一體的機器人SCAMP。
SCAMP是一種有腿的四旋翼,可以在墻壁上棲息,然后用細小的腳爬上它們。
SCAMP是第一個將飛行、棲息與被動依附技術和攀爬結合在一起的機器人。它也可以從攀爬失敗中恢復,也可以在準備再次飛行時起飛。所有這些都是在戶外進行的,只使用搭載的感應裝置和計算能力,利用以前所有的攀爬機器人的經驗以及從大自然中吸取的教訓。
SCAMP的腿部設計讓人聯想到許多攀緣昆蟲,從長腿叔叔到螳螂,這絕非偶然。動物需要長而有效的步伐,但受四肢重量的限制。當我們進入昆蟲的世界時,異速標度法則意味著長、瘦、幾乎失重的腿成為首選的解決方案。
SCAMP并不是昆蟲大小的,但是也足夠小到像碳纖維和光譜這樣的現代工程材料能提供的大小,讓我們可以制造出像爬蟲一樣長、重量高效的腿。
來自CMU的WAALBOT

Waalbot由兩套三足輪組成,它們使用旋轉執行機構進行單自由度運動,包括被動關節和彈性屈曲。Waalbot不像其他機器人那樣使用真空吸力或磁力吸引,而是使用干式粘合,以粘在墻壁和天花板上。
采用PIC單片機控制機器人的運動,它具有車載電源。此外,一個彈簧負載的尾巴確保機器人總是會推到表面。
Waalbot有能力克服小的障礙,這主要得益于它的腿的運動。
縱觀各種爬墻機器人,原理以及機械結構各異。有的利用仿生學,學習壁虎爬墻的原理,有的利用力學設計機械結構,通過增加螺旋槳或者輪子實現飛行和攀爬。然而不拋開這些,它們都是實現了同一個愿景,并且希望能將這些機器人應用于搜索和救災中。