




太空服務(wù)小能手—“壁虎”仿生機(jī)器人
前不久,美國斯坦福大學(xué)研發(fā)出一款“壁虎”仿生機(jī)器人,主要用于清理日益增多的太空垃圾。研究人員通過觀察發(fā)現(xiàn),壁虎腳趾有數(shù)百個皮瓣,能在攀爬時與壁面完全接觸,產(chǎn)生阻止幾十公斤重物體脫離的粘附力,行走時又可輕松與壁面分離。受此啟發(fā),研究人員研制出一款類壁虎粘合墊,應(yīng)用在組合式機(jī)器人抓具上。
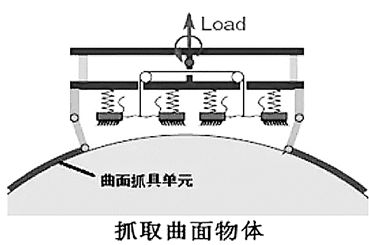
這種抓具分平面和曲面兩種單元,可依據(jù)物體形狀選擇。抓具單元表面覆有粘合墊,當(dāng)抓具沿特定方向施加壓力時,依靠粘合墊抓牢物體;壓力消失后,粘合墊與物體分離。實驗表明,一片相對較小的粘合墊可以抓住重達(dá)300公斤的物體。
機(jī)械抓具在太空微重力環(huán)境下抓住旋轉(zhuǎn)或翻滾的物體難度極大,“壁虎”仿生機(jī)器人由于具備超強(qiáng)的抓取能力,將著重用于清理各種形狀和材質(zhì)的太空垃圾,還可應(yīng)用于衛(wèi)星維護(hù)、航天器檢查和自主對接等任務(wù)。
相關(guān)標(biāo)簽
上一篇
新聞分享